TIME
El módulo time (utime) de la librería estándar de MicroPython proporciona un conjunto de funciones para indicar el tiempo que el microcontrolador lleva encendido, medir intervalos de tiempo e introducir retardos (esperas) en la ejecución de los programas.
En total dispone de 11 métodos (funciones): time(), ticks_ms(), ticks_us(), ticks_cpu(), localtime(), mktime(), ticks_add(), ticks_diff(), sleep(), sleep_ms() y sleep_us().
TIEMPO QUE EL MICROCONTROLADOR LLEVA ENCENDIDO
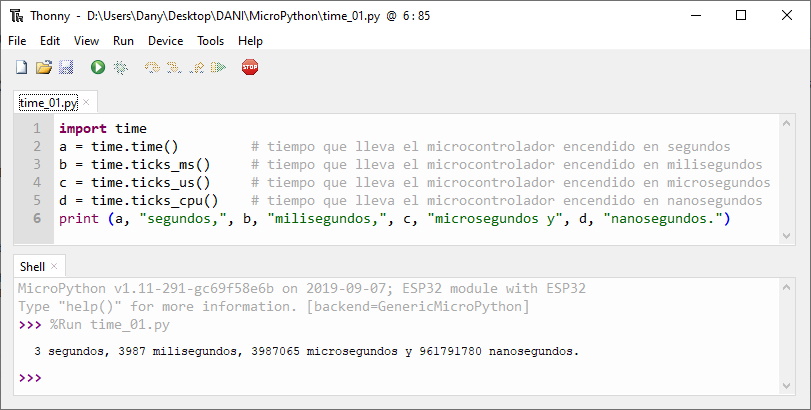
- Las funciones time(), ticks_ms(), ticks_us() y ticks_cpu() indican el tiempo que el microcontrolador lleva encendido. Utilizan respectivamente como unidades segundos, milisegundos, microsegundos y nanosegundos. El tiempo máximo que pueden almacenar es 230 = 1.073.741.823 unidades. Cuando se rebasa este número la cuenta se reinicia, por lo tanto
- si se utiliza time() se reiniciará cada 34a 1m 9d 13h 37′ 3″,
- si se utiliza ticks_ms() se reiniciará cada 12d 10h 15′ 41″ 823ms,
- si se utiliza ticks_us() se reiniciará cada 17′ 53″ 741ms 823us y
- si se utiliza ticks_cpu()se reiniciará cada 1″ 73ms 741.823us.
import time a = time.time() # tiempo que lleva el microcontrolador encendido en segundos a = time.ticks_ms() # tiempo que lleva el microcontrolador encendido en milisegundos b = time.ticks_us() # tiempo que lleva el microcontrolador encendido en microsegundos c = time.ticks_cpu() # tiempo que lleva el microcontrolador encendido en nanosegundos print (a, "segundos,", b, "milisegundos,", c, "microsegundos y", d, "nanosegundos.")
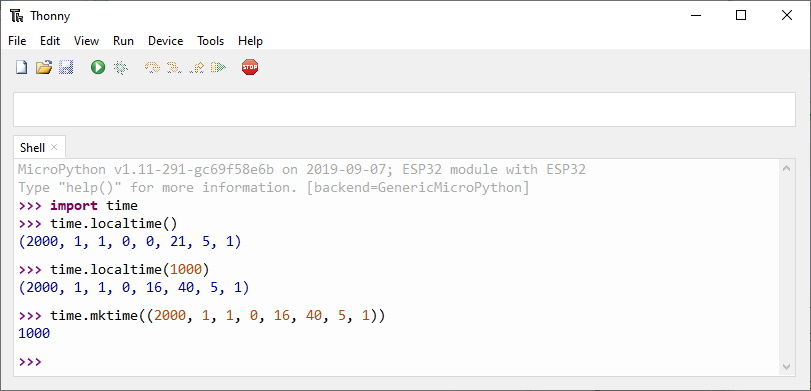
- La función localtime() convierte el tiempo que el microcontrolador lleva encendido o un valor que se proporciona, de segundos a una tupla de 8 elementos que contiene: (año –en miles p.e. 2019-, mes –del 1 al 12-, día –del 1 al 31-, hora –de la 0 a la 23-, minuto –del 0 al 59-, segundo –del 0 al 59-, día de la semana –del 0 al 6 para lunes a domingo-, día del año –del 1 al 366-), partiendo del 1 de enero de 2000.
- La función mktime() realiza la función inversa de localtime() convirtiendo una tupla de 8 elementos (año, mes, día, hora, minuto, segundo, día de la semana, día del año), partiendo del 1 de enero de 2000 a segundos.
import time
time.localtime() # tiempo que lleva el microcontrolador encendido
# (año -en miles-, mes -del 1 al 12-, día -del 1 al 31-, hora -de la 0 a la 23-,
# minuto -del 0 al 59-, segundo -del 0 al 59-, día de la semana -del 0 al 6 para lunes a domingo-,
# día del año -del 1 al 366-), partiendo del 1 de enero de 2000.
time.localtime(1000) # 1000 segundos en (año, mes, día, hora, minuto, segundo, día de la semana, día del año),
# partiendo del 1 de enero de 2000.
time.mktime((2000, 1, 1, 0, 16, 40, 5, 1)) # convierte la tupla (año, mes, día, hora, minuto, segundo,
# día de la semana, día del año) en segundos
# partiendo del 1 de enero de 2000.
INTERVALOS DE TIEMPO
- La función ticks_add() suma un valor (positivo o negativo entero) a otro valor devuelto por ticks_ms(), ticks_us(), ticks_cpu() o ticks_add(). ticks_diff (delta, ticks) tiene el mismo significado que delta + ticks.
- La función ticks_diff() mide la diferencia de tiempo entre valores devueltos por ticks_ms(), ticks_us() o ticks_cpu(). El orden de los argumentos es el mismo que de una sustracción ticks_diff (ticks1, ticks2) tiene el mismo significado que ticks1 – ticks2.
"""
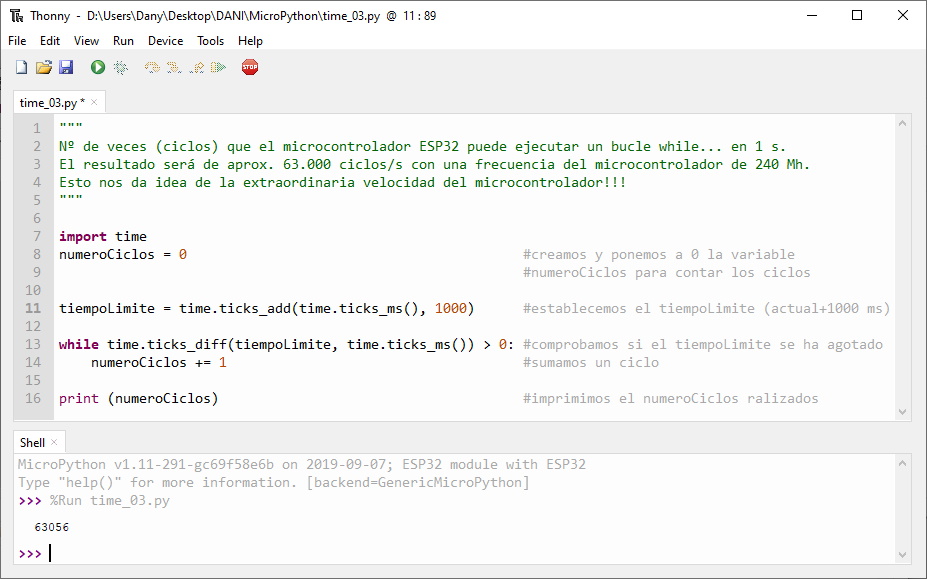
Nº de veces (ciclos) que el microcontrolador ESP32 puede ejecutar un bucle while... en 1 s.
El resultado será de aprox. 11.000 ciclos/s con una frecuencia del microcontrolador de 240 Mh.
Esto nos da idea de la extraordinaria velocidad del microcontrolador!!!
"""
import time
numeroCiclos = 0 #creamos y ponemos a 0 la variable numeroCiclos para contar los ciclos
tiempoLimite = time.ticks_add(time.ticks_ms(), 1000) #establecemos el tiempoLimite (actual + 1000 ms)
while time.ticks_diff(tiempoLimite, time.ticks_ms()) > 0: #comprobamos si el tiempoLimite se ha agotado
numeroCiclos += 1 #sumamos un ciclo
print (numeroCiclos) #imprimimos el numeroCiclos ralizados
RETARDOS (ESPERAS)
-
-
- Las funciones sleep(), sleep_ms() y sleep_us() introducen retardos (esperas) en la ejecución del programa por el microcontrolador, deteniéndola el tiempo que se especifique. Utilizan respectivamente como unidades segundos, milisegundos y microsegundos.
-
import time time.sleep(1) # interrumpe el procesamiento 1 segundo time.sleep_ms(750) # interrumpe el procesamiento 750 milisegundos time.sleep_us(250) # interrumpe el procesamiento 250 microsegundos












4 Comments
Leave your reply.