
INTRODUCCIÓN
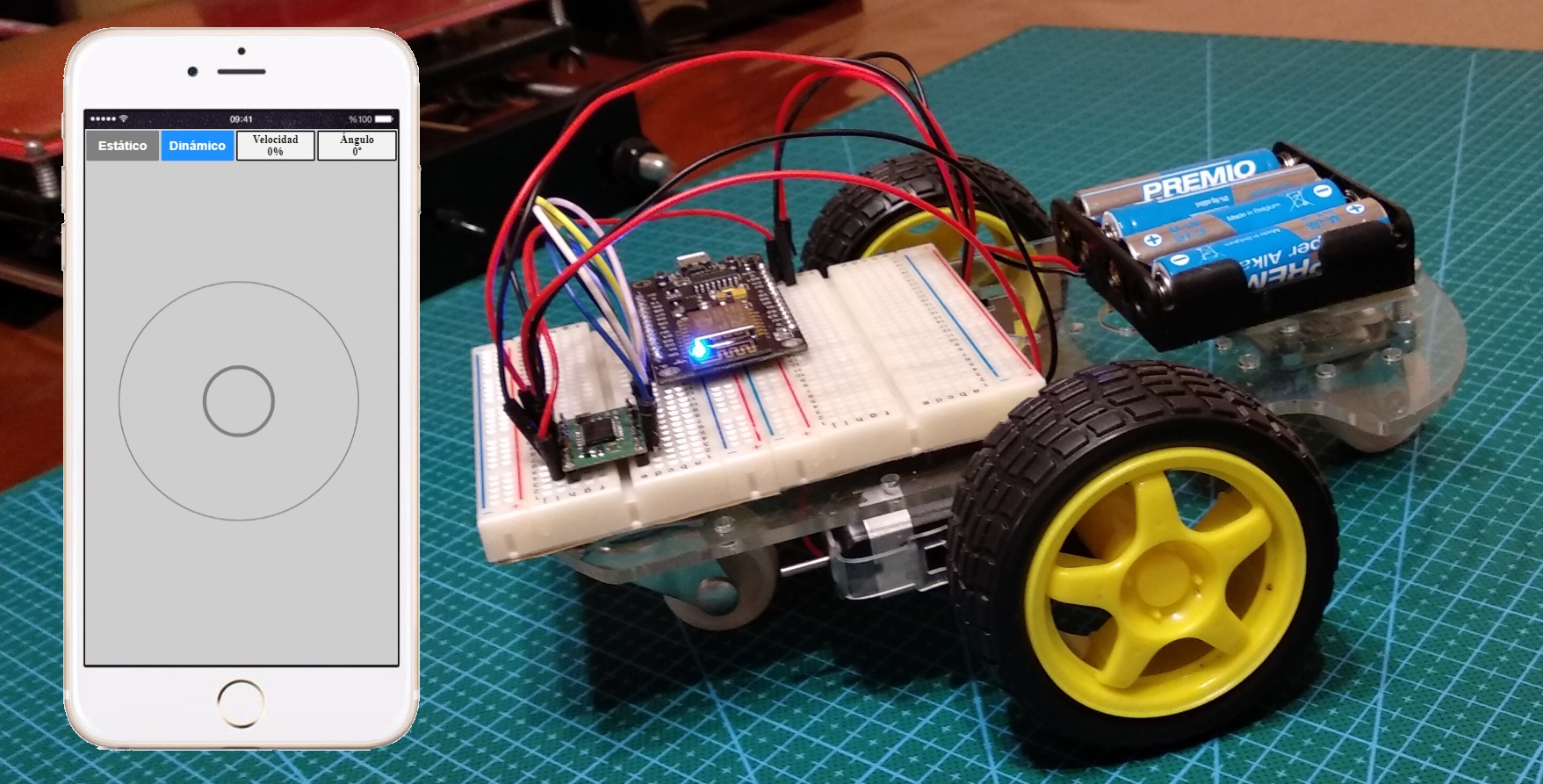
En esta práctica se va a desarrollar el diseño y uso de un JoyStick – WiFi con comunicación mediante WebSocket con un smartphone u ordenador para controlar un coche de juguete.
De esta forma, mediante una conexión WiFi en modo SoftAP accedemos al servidor del módulo ESP8266, estableciendo una conexión sin latencia, que nos permite un control muy sencillo y fiable del coche.
El control se hace mediente una sencilla página WEB 😉 implementada en el código del sketch de Arduino y alojada en la memoria flash (PROGMEM) del ESP8266, en lugar de la memoria SRAM, donde normalmente va el sketch, lo que facilita en gran medida su escritura, compresión y uso.
El motivo para utilizar una página WEB, es cada vez son más populares, especialmente por su portabilidad, ya que una vez escritas se pueden ejecutar en cualquier plataforma (android, windows, ios, etc.) a través de un navegador WEB (Mozzilla, Google Chrome, Safari, Microsoft Edge…). Con esto evitamos el principal problema de la tecnología Bluetooth, que precisa de un controlador es específico para cada plataforma.
En el desarrollo de la práctica se han utilizado las siguientes fuentes de referencia e inspiración, que deben ser mencionadas por sus grandes aportaciones:
- El JoyStick multitouch escrito por Seb Lee-Delisle, que se puede encontrar en https://github.com/sebleedelisle/JSTouchController.
- La práctica del vehículo controlado por WebSocket escrita por Alejandro Alomar, que se puede encontrar en http://www.sinaptec.alomar.com.ar/2017/10/proyecto-4-esp8266-vehiculo-controlado.html.
- La librería escrita por Markus Sattler (WebSocketsServer.h), para establecimiento de conexiones WebSocket en Arduino, que puede encontrarse en https://github.com/Links2004/arduinoWebSockets/blob/master/src/WebSocketsServer.h.
MATERIAL NECESARIO





CONEXIONADO
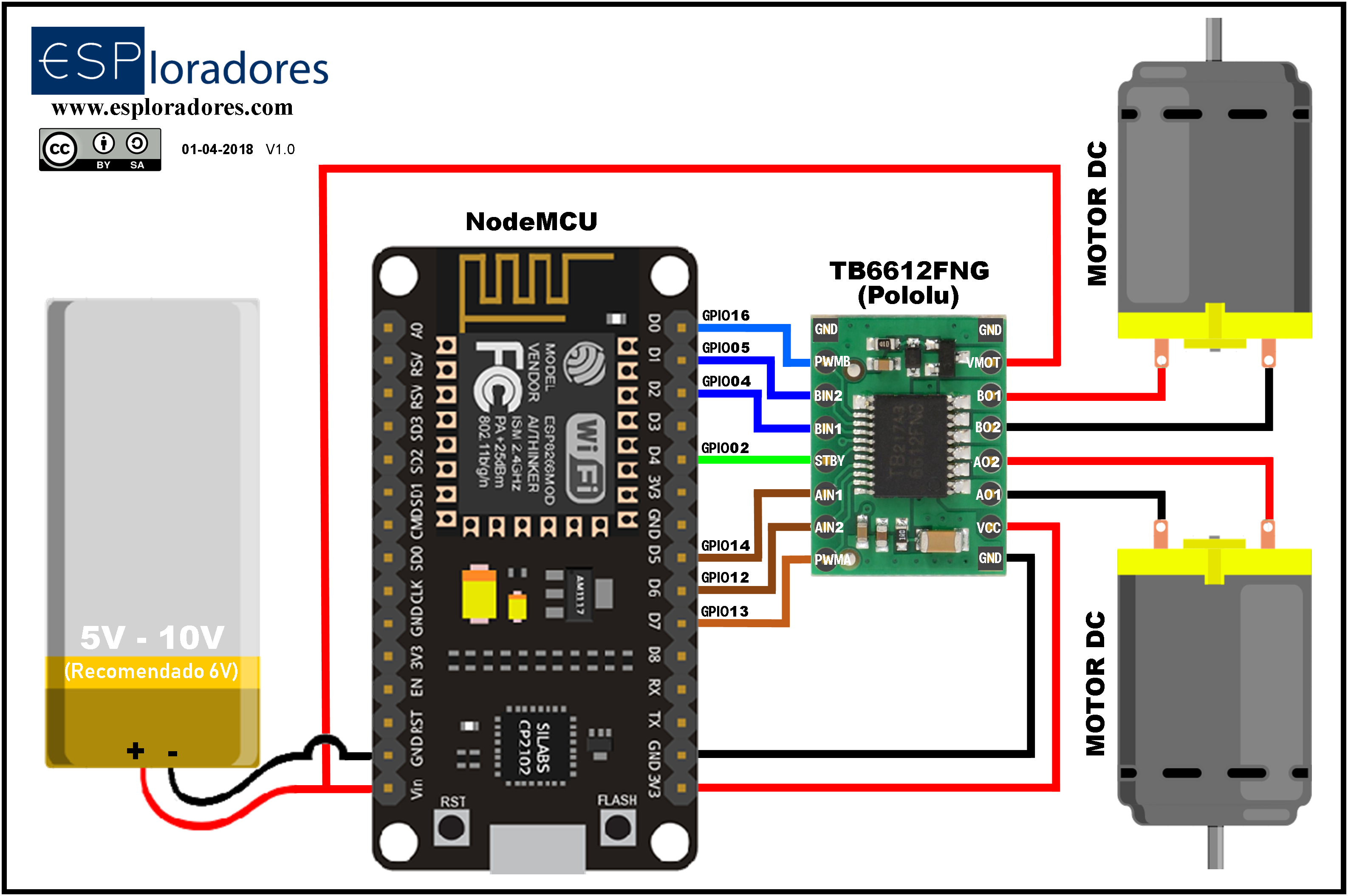
Si conectáramos los motores para hacer funcionar el coche directamente a la palaca NodeMCU (o al procesador ESP8266) se quemaría, debido a que el procesador no está preparado para la intensidad que demandan los motores para su funcionamiento. Es necesario utilizar un controlador de motores (driver).
En este proyecto se ha optado como controlador de motores por el TB6612FNG, ya que es una excelente opción para trabajar con los 3,3V con los que funcionan las entradas y salidas del procesador ESP8266.
El TB6612FNG está compuesto por dos etapas MOSFET en H y permite controlar de forma individual tanto la dirección, como la velocidad de giro de dos motores. En el modelo utilizado, una placa de la marca Pololu, la dirección del primer motor se controlada con las entradas AIN1 – AIN2 y las del segundo motor con las entradas BIN1 – BIN2. La velocidad de giro se controla mediante una señal PWM que se recibe para el primer motor por la entrada PWMA y en para el segundo motor por la entrada PWMB.
La placa de Pololu también dispone de un pin STBY (STANDBY) para desactivar el controlador TB6612FNG. Es necesario que el pin tenga tensión (3,3 V) para que el controlador funcione.
La tensión para alimentar la placa (3,3 V) se recibe por la entrada VCC y la de alimentación de los motores se recibe por la entrada VMOT (de 4,5 a 13,5 V). Las salidas de alimentación del primer motor son A01 – A02 y las del segundo motor B01 – B02.
El esquema se ha intentado simplificar al máximo para que sea fácil de entender y seguir, intentando evitar el cruzamiento de cables y eligiendo colores que faciliten su comprensión.
CONTROL DEL VEHÍCULO
Es el propio procesador quien crea la red (punto de acceso –access point-), con la que nos conectamos para acceder a la página HTML que genera el JoyStick.
Una vez que hemos cargado el sketch en el procesador ESP8266 veremos que se ha creado un red WiFi con nuestro smartphone u ordenador con conexión WiFi. El nombre de la red es «VEHICULO» y la clave de conexión «12345678«.
Accediendo a la dirección IP del punto de acceso: http://192.168.4.1 o simplemente 192.168.4.1, desde cualquier navegador WEB (Mozzilla, Google Chrome, Safari, Internet Explorer, Microsoft Edge…), se ejecutará el código HTML y se visualizará el JoyStick en el navegador.
SKETCH
El sketch en un principio puede parecer largo y complejo, pero analizándolo se puede ver que tiene una estructura bastante sencilla.
Lo que mas ocupa es el código de la página WEB que interpretará el navegador para generar el JoyStick. El objetivo del mismo es generar una superficie de dibujo (canvas) en la pantalla del smartphone, tablet u ordenador que utilicemos para controlarlo, que pueda detectar los eventos táctiles o de un ratón para manejarlo.
Este código está situado entre las líneas 40 y 248 del sketch e indicando de forma rápida las funciones de cada una de sus partes, quedaría como se indica a continuación:
- Líneas 48 a 59: se define el aspecto estético del canvas y los botones.
- Líneas 62 a 67: se representan los botones en la pantalla.
- Líneas 71 a 87: se definen todas las variables a utilizar, incluidas las necesarias para la conexión WebSocket.
- Líneas 89 a 117: se dibuja el canvas en la pantalla y en caso de que la pantalla cambie de tamaño (por giro) se resetea conforme al nuevo tamaño de pantalla.
- Líneas 135 a 147: gestiona el funcionamiento “ESTÁTICO” o “DINÁMICO”.
- Líneas 149 a 199: gestiona los eventos recibidos, ya sean de un dispositivo táctil o de un ratón. Los eventos pueden ser un nuevo toque, un desplazamiento o la finalización de un toque o desplazamiento.
- Líneas 201 a 244: se establece la actualización de la pantalla (cuando hay cambios por eventos táctiles o del ratón) y el envío de datos para realizar el movimiento del coche vía WebSocket al módulo ESP8266.
El procesador ESP8266 recibe desde el navegador cadenas de texto con la velocidad y el ángulo de giro en radianes (que se componen en la línea 241, en función de los eventos táctiles o del ratón en el JoyStick), por ejemplo «Velocidad: 24 Angulo: 2.23«.
Una vez recibida la comunicación, en la línea 272 del sketch esta se convierte en una cadena de texto y en las líneas 273 y 274 se extraen los valores y se asignan a las variables numéricas «velocidad» y «angulo«.
A partir de este punto se gestiona el control de encendido, apagado y velocidad de los motores con los dos valores recibidos.
/* JoyStick WiFi escrito por Dani No www.esploradores.com
Este sofware está escrito bajo la licencia CREATIVE COMMONS con Reconocimiento - CompartirIgual
(CC BY-SA) https://creativecommons.org/
Basado en el muti-touch game controler de Seb Lee-Delisle (C)2010-2011, www.sebleedelisle.com
-Redistributions of source code must retain the above creative commons and copyright notices, this
list of conditions and the following disclaimer.
-Redistributions in binary form must reproduce the above creative commons and copyright notices, this
list of conditions and the following disclaimer in the documentation and/or other materials provided
with the distribution.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED
WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN
IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
#include <ESP8266WiFi.h>
#include <WebSocketsServer.h>
#include <ESP8266WebServer.h>
#define IZQ_PWM 16 // D0 (PWMB)
#define IZQ_AVZ 05 // D1 (BIN2)
#define IZQ_RET 04 // D2 (BIN1)
#define STBY 02 // D4 (STBY)
#define DER_RET 14 // D5 (AIN1)
#define DER_AVZ 12 // D6 (AIN2)
#define DER_PWM 13 // D7 (PWMA)
#define PI 3.141593
const char* ssid = "VEHICULO";
const char* password = "12345678";
static const char PROGMEM INDEX_HTML[] = R"(
<!doctype html>
<html>
<head>
<meta charset=utf-8>
<meta name='viewport' content='width=device-width, height=device-height, initial-scale=1.0, maximum-scale=1.0'/>
<title>JoyStick</title>
<style>
*{-webkit-touch-callout: none; -webkit-text-size-adjust: none; -webkit-tap-highlight-color: #FFFFFF; -webkit-user-select: none; -webkit-tap-highlight-color: #FFFFFF;}
body {margin: 0px;}
canvas {display:block; position:absolute}
.containerButtons {width: auto; display: flex; justify-content: space-around;}
.buttons {border: none; color: white; padding: 4px 4px; text-align: center; text-decoration: none; display: inline-block; font-size: 4.0vmin; font-weight: bold; margin: 4px 2px;
-webkit-transition-duration: 0.4s; transition-duration: 0.4s; cursor: pointer; width: 25%; border-radius: 2px;}
.btn1 {background-color: #808080; color: #FFFFFF; border: 3px solid #808080;} .btn1:hover {background-color: #F2F2F2; color: #000000; border: 3px solid #FF0000;}
.btn2 {background-color: #1E90FF; color: #FFFFFF; border: 3px solid #1E90FF;} .btn2:hover {background-color: #F2F2F2; color: #000000; border: 3px solid #FF0000;}
.data {padding: 2px 4px; background-color: #F2F2F2; color: #000000; font-size: 3.5vmin; border: 2px solid #000000;}
.containerCanvas {width: auto;}
</style>
<body id='body'>
<div class='containerButtons'>
<button class='buttons btn1' onclick='onStatic()' autofocus>Estático</button>
<button class='buttons btn2' onclick='onDynamic()'>Dinámico</button>
<p id='txt1_id' class='buttons data'></p>
<p id='txt2_id' class='buttons data'></p>
</div>
<script>
///////VARIABLES GLOBALES Y OPERACIONES CON VECTORES ///////
var canvas, c , containerCanvas, ratioWindow, ladoMenor;
var estatico = true, touchStart = false, mouseDown = false;
var angRad, angGrd, vectorHypot, speed;
var vector2 = function (x,y) {this.x= x || 0; this.y = y || 0;};
vector2.prototype = {
reset: function ( x, y ) {this.x = x; this.y = y; return this;},
copyFrom : function (v) {this.x = v.x; this.y = v.y; return this;},
minusEq : function (v) {this.x-= v.x; this.y-= v.y; return this;},
};
var pos = new vector2(0,0), startPos = new vector2(0,0), vector = new vector2(0,0), posMax = new vector2(0,0);
var connection = new WebSocket('ws://'+location.hostname+':81/', ['arduino']);
connection.onopen = function () {connection.send('Connect ' + new Date()); };
connection.onerror = function (error) {console.log('WebSocket Error ', error);};
connection.onmessage = function (event) {console.log('Server: ', event.data);};
///////CANVAS///////
setupCanvas();
function setupCanvas() {
canvas = document.createElement('canvas');
c = canvas.getContext('2d');
resetAll();
containerCanvas = document.createElement('div');
containerCanvas.className = "containerCanvas";
document.body.appendChild(containerCanvas);
containerCanvas.appendChild(canvas);
}
function resetAll () {
var buttonsHeight = Math.min(window.innerWidth, window.innerHeight)*0.04+44;
canvas.width = window.innerWidth; canvas.height = window.innerHeight-buttonsHeight;
ratioWindow = canvas.width/canvas.height; ladoMenor=Math.min(canvas.width, canvas.height);
window.scrollTo(0,0);
c.font = Math.round(ladoMenor*0.03) + 'px sans-serif';
c.fillStyle = "white";
c.textAlign="center";
estatico? onStatic() : onDynamic();
}
function resetByOrientationchange () {
document.body.removeChild(containerCanvas);
setTimeout(function(){
setupCanvas();
startEventListener();
}, 450);
}
///////DETECCIÓN DE EVENTOS Y DETERMINACIÓN DEL TIPO DE DISPOSITIVO SEÑALADOR (TÁCTIL O RATÓN)///////
var touchable = 'createTouch' in document;
startEventListener();
function startEventListener(){
window.onresize = resetAll;
if(touchable) {
canvas.addEventListener( 'touchstart', onTouchStart, false);
canvas.addEventListener( 'touchmove', onTouchMove, false);
canvas.addEventListener( 'touchend', onTouchEnd, false);
window.onorientationchange = resetByOrientationchange;
} else {
canvas.addEventListener( 'mousedown', onMouseDown, false);
canvas.addEventListener( 'mousemove', onMouseMove, false);
['mouseup', 'mouseout'].forEach(function(event){canvas.addEventListener(event,onMouseEnd,false);});
}
}
///////ESTÁTICO / DINÁMICO///////
function onStatic() {
estatico = true;
document.getElementById('body').style.background= '#CECECE';
c.strokeStyle = '#808080';
drawOnCanvasStartOrMoveEnd();
}
function onDynamic() {
estatico = false;
document.getElementById('body').style.background= '#ADD8E6';
c.strokeStyle = '#1E90FF';
drawOnCanvasStartOrMoveEnd();
}
///////GESTIÓN DE DISPOSITIVO TÁCTIL///////
function onTouchStart(event) {
touchStart = true;
if (estatico){
pos.reset(event.touches[0].clientX-canvas.getBoundingClientRect().left, event.touches[0].clientY-canvas.getBoundingClientRect().top);
vector.copyFrom(pos);
vector.minusEq(startPos);
} else {
startPos.reset(event.touches[0].clientX-canvas.getBoundingClientRect().left, event.touches[0].clientY-canvas.getBoundingClientRect().top);
pos.copyFrom(startPos);
}
}
function onTouchMove(event) {
if (touchStart){
event.preventDefault();
pos.reset(event.touches[0].clientX-canvas.getBoundingClientRect().left, event.touches[0].clientY-canvas.getBoundingClientRect().top);
vector.copyFrom(pos);
vector.minusEq(startPos);
}
}
function onTouchEnd(event) {
touchStart = false;
drawOnCanvasStartOrMoveEnd();
sendData ();
}
///////GESTIÓN DEL RATÓN///////
function onMouseDown(event) {
event.preventDefault();
mouseDown = true;
if (estatico){
pos.reset(event.offsetX, event.offsetY);
vector.copyFrom(pos);
vector.minusEq(startPos);
} else {
startPos.reset(event.offsetX, event.offsetY);
pos.copyFrom(startPos);
}
}
function onMouseMove(event) {
if(mouseDown){
pos.reset(event.offsetX, event.offsetY);
vector.copyFrom(pos);
vector.minusEq(startPos);
}
}
function onMouseEnd(event) {
mouseDown = false;
drawOnCanvasStartOrMoveEnd();
sendData ();
}
///////DIBUJO DE LA BASE Y STICK///////
setInterval(drawOnMove, 1000/50);
function drawOnMove() {
if(touchStart || mouseDown) {
c.clearRect(0,0,canvas.width, canvas.height);
drawBase (startPos.x, startPos.y);
newValues ();
drawStick ();
drawText ();
sendData ();
}
}
function drawOnCanvasStartOrMoveEnd(){
c.clearRect(0,0,canvas.width, canvas.height);
startPos.reset(canvas.width/2,canvas.height/2);
vector.reset(0,0);
estatico? drawBase() : c.fillText('TOCA LA PANTALLA PARA COMENZAR',canvas.width/2,canvas.height/2);
newValues ();
drawText ();
}
function newValues(){
angRad = Math.atan2(-vector.y,vector.x).toFixed(2);
angGrd = Math.round(angRad*180/Math.PI);
vectorHypot = Math.hypot(vector.x,vector.y);
posMax.reset(startPos.x+Math.min(vectorHypot, ladoMenor*0.25)*Math.cos(angRad), startPos.y-Math.min(vectorHypot, ladoMenor*0.25)*Math.sin(angRad));
speed = Math.round((Math.min(vectorHypot,ladoMenor*0.25)/(ladoMenor*0.25)*100));
}
function drawBase(){
c.beginPath(); c.lineWidth = 6; c.arc(startPos.x, startPos.y, ladoMenor*0.10 ,0,Math.PI*2,true); c.stroke();
c.beginPath(); c.lineWidth = 2; c.arc(startPos.x, startPos.y, ladoMenor*0.35 ,0,Math.PI*2,true); c.stroke();
}
function drawStick(){
c.beginPath(); c.arc(posMax.x, posMax.y, ladoMenor*0.10, 0,Math.PI*2, true); c.stroke();
}
function drawText(){
document.getElementById('txt2_id').innerHTML = 'Ángulo<br/>'+angGrd+'º';
document.getElementById('txt1_id').innerHTML = 'Velocidad<br/>'+speed+'%';
}
function sendData(){
var dir = 'Velocidad:'+speed+' Angulo:'+angRad;
console.log(dir);
connection.send(dir);
}
</script>
</body>
</html>
)";
ESP8266WebServer server (80);
WebSocketsServer webSocket = WebSocketsServer(81);
void webSocketEvent(uint8_t num, WStype_t type, uint8_t * payload, size_t length) {
switch(type) {
case WStype_DISCONNECTED:
Serial.printf("[%u] Disconnected!\n", num);
analogWrite(IZQ_PWM, 0);
analogWrite(DER_PWM, 0);
break;
case WStype_CONNECTED: {
IPAddress ip = webSocket.remoteIP(num);
Serial.printf("[%u] Connected from %d.%d.%d.%d url: %s\n", num, ip[0], ip[1], ip[2], ip[3], payload);
webSocket.sendTXT(num, "Connected"); // send message to client
}
break;
case WStype_TEXT:
Serial.printf("Número de conexión: %u - Texto recibido: %s\n", num, payload);
if(num == 0) { //Únicamente va a reconocer la primera conexión (softAP).
String str = (char*)payload; //Ejemplo de texto recibido: Velocidad:100 Angulo:-1.88
int velocidad = str.substring(str.indexOf(':',str.indexOf("Velocidad:"))+1,str.indexOf(' ',str.indexOf("Velocidad:"))).toInt();
float angulo = str.substring(str.indexOf(':',str.indexOf("Angulo:"))+1).toFloat();
//uint8_t velocidadMax = velocidad*255/100; //La velocidad se envía con valores entre 0 y 100. Se debe mapear a 0-255
uint8_t velocidadMax = 85+velocidad*170/100; //Se corrige el mapeo porque el motor entre los valores 0-84 no se mueve, se mueve ente los valores 85-255
//uint8_t velocidadSin = abs(velocidadMax*sin(angulo)); //Giro coche rápido
uint8_t velocidadSin = abs(velocidadMax*sin(abs(2*angulo/3)+PI/6)); //Giro coche intermedio
//uint8_t velocidadSin = abs(velocidadMax*sin(abs(angulo/2)+PI/4)); //Giro coche lento
float anguloCos = cos(angulo);
//Sentido de giro de los motores
if(angulo > 0) { //Primer y segundo cuadrante
digitalWrite(STBY, 1);
digitalWrite(IZQ_AVZ, 1); digitalWrite(IZQ_RET, 0); digitalWrite(DER_AVZ, 1); digitalWrite(DER_RET, 0);
}else if(angulo < 0) { //Tercer y cuarto cuadrante
digitalWrite(STBY, 1);
digitalWrite(IZQ_AVZ, 0); digitalWrite(IZQ_RET, 1); digitalWrite(DER_AVZ, 0); digitalWrite(DER_RET, 1);
}else { //Parado
digitalWrite(STBY, 0);
digitalWrite(IZQ_AVZ, 0); digitalWrite(IZQ_RET, 0); digitalWrite(DER_AVZ, 0); digitalWrite(DER_RET, 0);
}
//Velocidad de los motores
uint8_t izq, der;
if(anguloCos > 0) { //Primer y cuarto cuadrante
izq = velocidadMax; der = velocidadSin;
} else { //Segundo y tercer cuadrante
izq = velocidadSin; der = velocidadMax;
}
analogWrite(IZQ_PWM, izq);
analogWrite(DER_PWM, der);
//Serial.print(anguloCos); Serial.print(" "); Serial.print(izq); Serial.print(" "); Serial.println(der);
}
break;
}
}
void setup() {
Serial.begin(115200);
Serial.println();
WiFi.softAP(ssid, password);
IPAddress myIP = WiFi.softAPIP();
Serial.print("IP del access point: ");
Serial.println(myIP);
Serial.println("WebServer iniciado...");
// start webSocket server
webSocket.begin();
webSocket.onEvent(webSocketEvent);
// handle index
server.on("/", []() {
server.send_P(200, "text/html", INDEX_HTML);
});
server.begin();
pinMode(IZQ_PWM, OUTPUT); pinMode(DER_PWM, OUTPUT);
pinMode(IZQ_AVZ, OUTPUT); pinMode(DER_AVZ, OUTPUT);
pinMode(IZQ_RET, OUTPUT); pinMode(DER_RET, OUTPUT);
pinMode(STBY, OUTPUT);
digitalWrite(IZQ_PWM, 0); digitalWrite(DER_PWM, 0);
digitalWrite(IZQ_AVZ, 0); digitalWrite(DER_AVZ, 0);
digitalWrite(IZQ_RET, 0); digitalWrite(DER_RET, 0);
digitalWrite(STBY, 0);
analogWriteRange(255);
}
void loop() {
webSocket.loop();
server.handleClient();
}



16 Comments
Leave your reply.